
Member of Technical Staff at Anthropic
yifany AT csail.mit.edu
Google Scholar
Github
LinkedIn
Curriculum Vitae
使用 Programmatic Dependent Launch (PDL) 降低端到端延迟 中文版
免责声明:本博客的内容反映的是我个人在业余时间学习 GPU 编程时的经验与观点。所有信息均来自公开资料,不代表 NVIDIA Corporation 或其任何关联公司的观点或立场。
本篇是英文版 Using Programmatic Dependent Launch (PDL) to Reduce End-to-End Latency 原文的中文翻译。
0. 引言
有很多方法可以降低神经网络计算(训练/推理等)的端到端延迟。其中比较值得一提的有:
- Kernel 优化:降低单个 kernel 的延迟。
- CUDA Graphs:通过把 kernel launch 卸载到 GPU 上,消除 CPU 的 launch 开销。
- Multi-Stream:允许多个相互独立的 kernel 在不同的 stream 中并行执行。
- Programmatic Dependent Launch (PDL):让同一个 stream 中两个相互依赖的 kernel 的执行相互重叠。
- Megakernel(例如 Hazy research、Mirage Persistent Kernel):通过把每一层都 fuse 进单个 kernel 来降低 kernel launch 开销。
在本博客中,我们重点介绍相对鲜为人知的 PDL。它是一种相对轻量的优化,能为你带来一些额外的延迟降低。 重要的是,它作用于一连串相互依赖的 kernel,而这正是神经网络训练和推理中很常见的模式。 如果这些 kernel 是相互独立的,那你应该无脑使用 multi-stream。
本博客中的所有代码都可以在这里找到。
1. 什么是 PDL?
Programmatic Dependent Launch (PDL) 是 Hopper 架构引入的一项硬件特性。 它允许同一个 stream 中相互依赖的 kernel 彼此重叠执行。 下图展示了一个 PDL 有助于降低端到端延迟的例子。
假设我们有两个相互依赖的全连接层 FC1 和 FC2。FC1 的输出(y)就是 FC2 的输入。我们把它们放在同一个 stream 中运行。
y = W1 * x # FC1
z = W2 * y # FC2
每个 FC 层本质上就是一个 gemm kernel。一个 gemm threadblock 的延迟大致可以分为四个部分:
- Threadblock Launch 开销:GPU 硬件需要花一些时间来 launch 这个 threadblock。
- Prolog:kernel 做一些初始化工作,例如常量加载、barrier 初始化、tmem 分配等。重要的是,prolog 不依赖前一个 kernel 的输出。
- Mainloop:kernel 加载权重和输入,执行 gemm 计算,然后把输出存储到 global memory。重要的是,mainloop 依赖前一个 kernel 的输出。
- Grid-ending membar:在 threadblock 结束时会发射一个全局内存屏障(membar),以确保该 threadblock 的输出全局可见(即已 commit 到 global memory)。这样下一个依赖它的 kernel 才能读到正确的数据。
prolog/mainloop(橙色部分)是用户在 kernel 中编写的代码。而 threadblock launch 开销和 grid-ending membar(绿色部分)则是执行每个 kernel 时相伴的硬件开销。
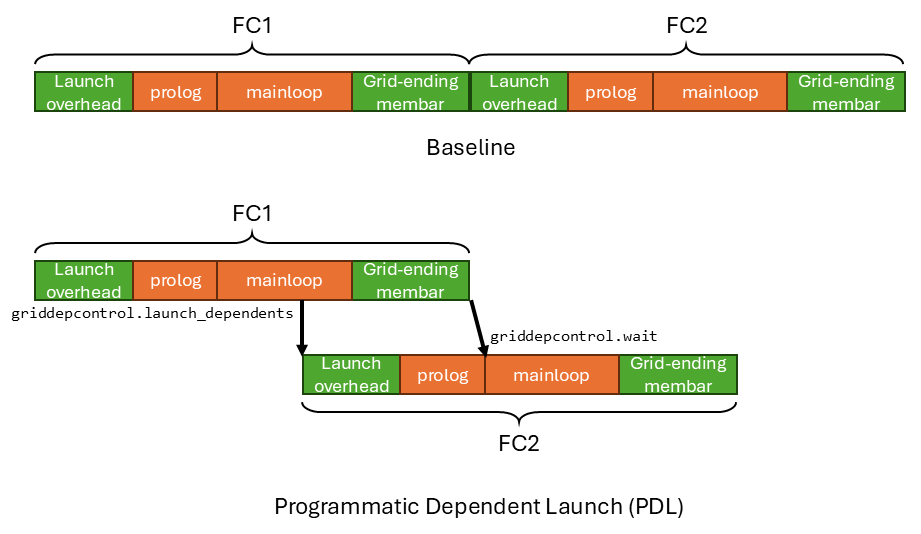
在没有 PDL 的情况下,运行 FC1+FC2 的延迟是 FC1 launch overhead + FC1 prolog + FC1 mainloop + FC1 grid-ending membar + FC2 launch overhead + FC2 prolog + FC2 mainloop + FC2 grid-ending membar。FC2 只有在 FC1 的 grid-ending membar 完成之后才会被 launch,也就是说此时 FC1 的输出已经在 global memory 中可见,对 FC2 也可见。
但请注意,FC2 的 launch 开销和 prolog 并不依赖于 FC1 的结果。只有 FC2 的 mainloop 的执行才依赖于 FC1 的结果。因此,关键路径延迟是 FC1 launch overhead + FC1 prolog + FC1 mainloop + FC1 grid-ending membar + FC2 mainloop + FC2 grid-ending membar。一旦 FC1 的 grid-ending membar 完成(即 FC1 的输出在 global memory 中可见,对 FC2 也可见),FC2 的 mainloop 就可以开始执行。
相比 baseline 的延迟,关键路径延迟省去了 FC2 launch overhead 和 FC2 prolog。
而 PDL 让你能够达到这个关键路径延迟——它把 FC1 的 mainloop 和 grid-ending membar 的执行,与 FC2 的 launch 时间和 prolog 重叠起来。
1.1 PDL 的 ISA 与硬件支持
为了实现 PDL,暴露了两条 ptx 指令:
griddepcontrol.launch_dependents:指定何时 launch 下一个 kernel。griddepcontrol.wait:阻塞当前 kernel,直到前一个 kernel 的输出就绪。
让我们沿着时间线走一遍,看看这两条指令是如何实现 PDL 的。FC1 正常执行,直到它在 mainloop 中间碰到 griddepcontrol.launch_dependents 指令。然后 griddepcontrol.launch_dependents 通知硬件去 launch FC2。FC2 的 prolog 开始执行,与 FC1 的 mainloop 和 grid-ending membar 重叠。
由于 FC2 的 mainloop 依赖 FC1 的输出,因此需要一种同步机制来通知 FC2:FC1 的输出已经就绪 / 在 global memory 中可见。
由于 FC2 已经被 launch 了,它可能会从 global memory 中读到 FC1 过期的(stale)输出。
这就是 griddepcontrol.wait 发挥作用的地方。
它确保 FC1 和 FC2 之间正确地同步。
在 FC2 的 prolog 结束后,它会在 FC2 mainloop 的开头碰到 griddepcontrol.wait 指令。硬件会在这条指令上阻塞,直到 FC1 的 grid-ending membar 完成,也就是 FC1 的输出在 global memory 中可见。
此时 FC2 的 mainloop 读取它就是安全的了。
然后 FC2 的 mainloop 一直执行到 kernel 结束。
最后还有一点需要注意:FC1 中的每个 threadblock 都会发射一条 griddepcontrol.launch_dependents 指令。
只有当 FC1 中最后一个 threadblock 的 griddepcontrol.launch_dependents 被发射之后,硬件才会去 launch FC2。
1.2 如果我在 FC1 中把下一个 kernel 的 griddepcontrol.launch_dependents 放得过晚/过早会怎样?
本质上,通过在 kernel 中手动插入 griddepcontrol.launch_dependents 和 griddepcontrol.wait,用户控制了两个 kernel 之间的重叠比例。
同时,用户也要负责通过正确放置 griddepcontrol.wait 来处理两个 kernel 之间的数据同步。
下图分别展示了用户在 FC1 中把 griddepcontrol.launch_dependents 放得过晚和过早的两种情况。
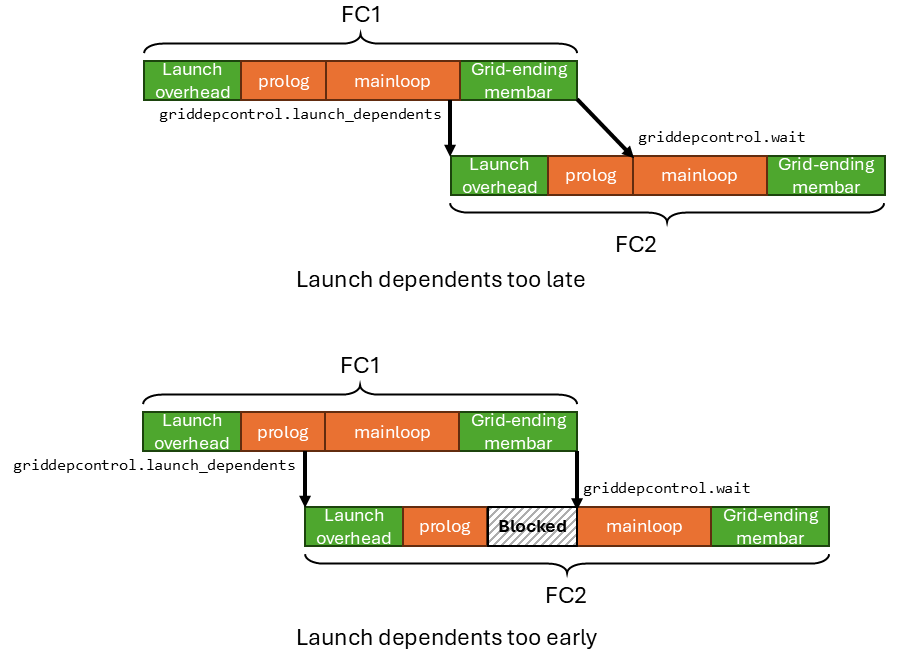
如果你把 griddepcontrol.launch_dependents 放得过晚(最极端的情况是放在 FC1 的末尾),那么和 FC2 的 prolog 之间就没有太多重叠发生,PDL 的收益就会减少。
如果你把 griddepcontrol.launch_dependents 放得过早(最极端的情况是放在 FC1 的开头),那么 FC2 的 prolog 会很早就完成。而它的 mainloop 会被 griddepcontrol.wait 阻塞,因为 FC1 还没有执行完、还没产生出输出。另一个隐患是 FC2 的 prolog 会干扰 FC1 mainloop 的执行,可能会拖慢它。
2. 如何使用 PDL?
许多重要的编程语言和框架已经支持 PDL:
- CUTLASS 把 PDL 称为 Grid Dependency Control (GDC)。CUTLASS 中大多数 gemm kernel 都配备了 PDL。
- Triton 通过 triton.language.extra.cuda 添加了对 PDL 的支持,tutorial 11 展示了它的用法。
- TensorRT-LLM 使用 PDL 来加速 DeepSeek R1 的低延迟推理。这是我做的 :)。
这里我来演示如何在纯 CUDA C++ kernel 中启用 PDL。要让一个 kernel 启用 PDL,你只需要改三个地方:
- 添加
griddepcontrol.waitptx 指令,以便与前一个 kernel 同步。 - 添加
griddepcontrol.launch_dependentsptx 指令,以便 launch 下一个 kernel。 - 在 kernel launch 配置中设置
PDL,使其以 PDL 方式被 launch。设置这个额外的 launch 配置需要用到新的 extensible launch API(cudaLaunchKernelEx)。
下面是一个启用了 PDL 的 kernel 的代码片段。
__global__ void pdl_kernel(...) {
prolog(...); // 不依赖前一个 kernel 的输出
asm volatile("griddepcontrol.wait;"); // 阻塞,直到前一个 kernel 的输出就绪
mainloop1(...); // 依赖前一个 kernel 的输出
asm volatile("griddepcontrol.launch_dependents;"); // 在这里 launch 下一个 kernel
mainloop2(...); // 剩余的计算,会与下一个 kernel 的 prolog 重叠
}
int main() {
// 在 kernel launch 属性中启用 pdl
cudaLaunchAttribute attrs[1];
attrs[0].id = cudaLaunchAttributeProgrammaticStreamSerialization;
attrs[0].val.programmaticStreamSerializationAllowed = 1;
// 设置 kernel launch 配置
cudaLaunchConfig_t config;
config.gridDim = ...;
config.blockDim = ...;
config.dynamicSmemBytes = ...;
config.stream = ...;
config.attrs = attrs;
config.numAttrs = 1;
// launch kernel
cudaLaunchKernelEx(&config, pdl_kernel, ...);
}
2.1 PDL 生效的条件
为了让 PDL 的 kernel 重叠真正生效,需要满足以下条件:
- 当前 kernel 正确放置了
griddepcontrol.wait,以确保与前一个 kernel 的同步正确。(如果当前 kernel 与前一个 kernel 没有数据依赖,那你可以直接去掉griddepcontrol.wait。) - 当前 kernel 使用
cudaLaunchKernelEx并设置了 PDL 属性来 launch。 - SM 有足够的资源同时运行两个 kernel。例如,两个 kernel 合起来的 smem 用量应该小于 SM 的 smem 容量。寄存器、线程数、warp 数、tmem 等也有类似的资源约束。如果这个条件不满足,两个 kernel 就只会被串行执行。
- (可选但推荐)前一个 kernel 在 kernel 中间放置了
griddepcontrol.launch_dependents,以便与当前 kernel 的 prolog 重叠。即使前一个 kernel 中没有griddepcontrol.launch_dependents,只要前三个条件满足,PDL 重叠仍然会发生。PDL 会假设griddepcontrol.launch_dependents被插入在前一个 kernel 的末尾,这样前一个 kernel 的 grid-ending membar 仍然能与当前 kernel 的 launch 时间和 prolog 重叠。
因此,griddepcontrol.wait 的放置位置同时影响性能和正确性。
而 griddepcontrol.launch_dependents 的放置位置只影响性能。
2.2 性能分析器(Profiler)支持
NVIDIA Nsight Systems 支持可视化 PDL 下的 kernel 重叠。

我用 nsys 运行了这份 demo 代码,得到了上面这张图。 可以清楚地看到,启用 PDL 后,两个 kernel 发生了重叠。 而没有 PDL 时,两个 kernel 是串行执行的。
3. 与 Megakernel 的区别
熟悉 megakernel 的专家们可能会问:这听起来和 megakernel 太像了——在 megakernel 里你也可以通过编程来控制每个 sub-kernel 何时被 launch,从而让它们彼此重叠。 确实,在这一点上它们是相似的。 但在我看来,最重要的区别在于两个相互依赖的 kernel 之间是如何同步的。
- 不带 PDL 的 baseline 单 stream launch:这是完全的硬件同步。硬件发射 grid-ending membar 来确保 FC1 的输出在 global memory 中可见,然后硬件再 launch FC2。硬件通过阻塞 FC2 的 launch 来保证正确性。
- PDL:这是软件辅助的硬件同步。硬件仍然发射 grid-ending membar 来确保 FC1 的输出在 global memory 中可见。但现在由软件来决定在 FC2 的哪个位置进行阻塞——即正确放置
griddepcontrol.wait。当 FC1 的 grid-ending membar 完成时,硬件会解除 FC2 中griddepcontrol.wait的阻塞。 - Megakernel:这是纯软件同步。我来描述一种可能的实现方式。软件在 FC1 末尾发射 membar。软件同时通过在一个 L2 atomics 上做 wait 来阻塞 FC2 的执行。FC1 通过在软件中对同一个 L2 atomics 做 atomics 操作,来通知 FC2 它的输出已经就绪(membar 已完成),从而解除 FC2 的阻塞。
这些方式都是在更低延迟和灵活性之间做权衡。硬件同步最高效,但最不灵活。软件同步最灵活,但最不高效。
4. 总结
在本博客中,我们介绍了 PDL,一种降低神经网络计算端到端延迟的技术。
- PDL 允许同一个 stream 中相互依赖的 kernel 重叠执行,以消除不必要的串行化。
- 我们讲解了 PDL 中用来实现它的两条 ISA 支持(
griddepcontrol.launch_dependents和griddepcontrol.wait)。 - 我们展示了如何在 CUDA C++ kernel 中启用 PDL。
- 我们解释了使用 PDL 在性能和功能上的影响。
- 最后,我们将 PDL 与 megakernel——另一种降低端到端延迟的技术——做了对比。
💬 Comments & Reactions